2022年度クラシックマウス v4rquZcl11
この記事はマイクロマウス Advent Calendar 2022の25日目の記事です。
昨日のは もすさんの工具の話でした。
私も仕事で工具を扱う機会が多いので参考にさせていただきたいです。
さて今年のAdvent Calendarを締めくくる記事ということで皆さんご期待頂いていることと存しますが、今回は特に捻りの無い機体紹介の記事となっています。
本当は別のことを書こうと思ったけど起きたら19時だったからね、仕方ないね。
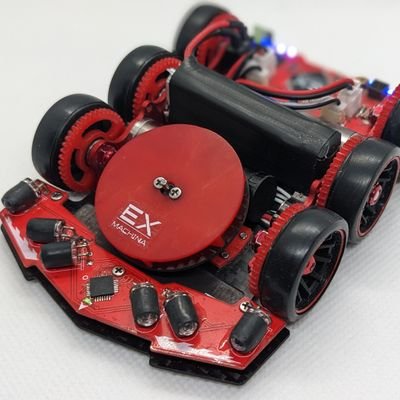
・機体名:v4rquNcl11(バーガンディ)
・名前の由来:ワインの種類から
・サイズ:108 x 77 x 25㎜
・重量:120g
・MCU:STM32F722RET6
・壁センサ:SFH4550 & VEMT2023SLX01 ⇒TPS601
・ジャイロセンサ:ISM330DHCXTR
・モーター:DCX12L(4.5V) & 型番不明 ブラシレス
・モータードライバー:TB6614FNG & Spendix ES20Lite
・バッテリー:220mAh 3S
- 基本方針
前作のコンセプトを引き継ぎつつ、課題点を改善した機体となっています。
- カーボンフレームマウス
前作同様、カーボンフレーム上に基板を載せる構造としています。
今回は自前のCNCで切削せず、海外のカーボン切削サービスに発注しました。
注文方法が特殊でしたが問題なく届き、自分で削るより端面が綺麗に出てたので満足です。
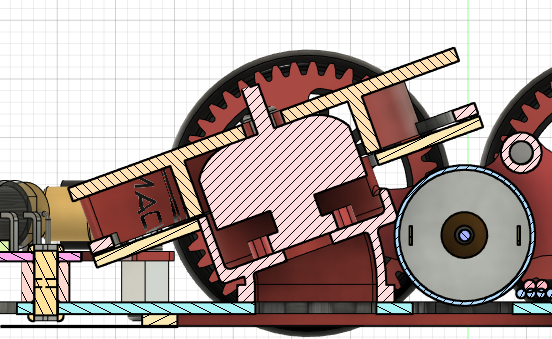
- ダクト吸引
こちらも前作同様ダクト吸引を採用していますが、今作は機体前面に配置しています。
理由としては吸引ユニットよりバッテリーの方が重いので、旋回イナーシャを低減するためにレイアウトを変更しました。
ただし、そのままでは吸引ファンの外形が大きくて配置できないため、モータに重なるように傾けて設置することで解消しています。
ダクトはFDMの3Dプリンタを採用しています。 足回りほど要求精度と剛性がシビアでなく、複雑な形状では3Dプリンタは便利です。
- ギヤモジュール変更
足回りはほぼ前作からの流用なので、しばらくはM0.3のギヤを採用していましたが、クラッシュ時にモータのパワーにギヤが負けて歯欠けすることがあったためM0.5に変更しました。
バックラッシを多くとる必要があるためガタが大きくなりますが、言うほど気にならないので歯が欠けなくなった恩恵のほうが大きいと考えています。
- 基板分割方式
前作と異なり、今作ではメイン基板(後方)とセンサー基板(前方)で分割しています。
分割式にしたのはレイアウト上の都合ですが、副次的なメリットとしてセンサー部のみの交換が可能になりました。
実際、年内の地区大会ではセンサーの構成が良くないのか走行に安定感がなかったため、センサー基板単体で再設計しています。
あとはセンサー基板をトレーサー用のラインセンサーに変更すればロボトレーサーに変身します。 多分やらんけど。
- 6輪
もうやめようかなと思う
まだまだ調整が満足にできていないので、来年の全日本には万全の状態で臨みたいです。
- 最後に
本日がMicromouse Advent Calenderの最終日でした。皆様いかがだったでしょうか。
今年はhmsnさんが発起人として始まりましたが、来年はどうなるんでしょう?
それでは皆さん、よいお年を。